

![]()
![]()
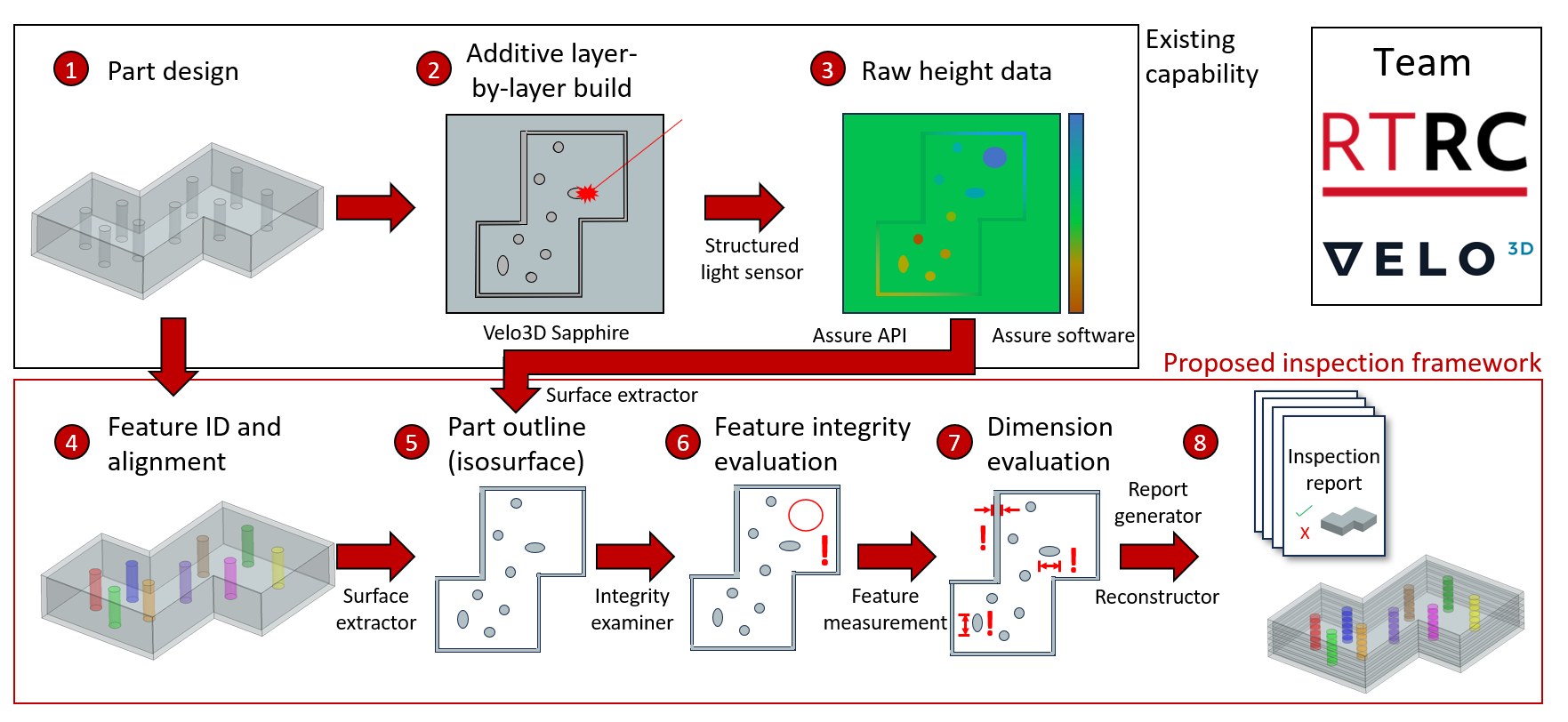
Proposed framework for inspection using in-situ height mapping data.
Problem
The ability to inspect complex laser powder bed fusion (L-PBF) parts has not maintained pace with design or manufacturing capabilities. The issue is particularly acute in parts with complex internal features due to the lack of accessibility from the exterior, thus rendering the traditional methods of inspection ineffective. This limits the ability to design for additive manufacturing (AM) as only designs that are inspectable can be practically deployed. A solution for inspecting the internal features of AM parts is needed to ensure cost-effectiveness and enable larger-scale designs.
Objective
Develop a framework to leverage in-situ process monitoring data to virtually reconstruct the part and inspect complex internal features for fidelity and dimensionality. Acquired data can be compared to the nominal design model for a quality check, providing a full three-dimensional understanding of the produced part.
Technical Approach
Raytheon Technology Research Center (RTRC) is developing a framework to leverage in-situ AM height mapping data to virtually reconstruct the part and inspect complex internal features. The use of in-situ data has the advantage of resolving the part on a layer-by-layer basis providing access to a part’s internal features as they build. In the project, the team will employ in-situ data for the following:
- Quantitative measurement of internal feature dimensions (2D)
- 3D reconstruction of as-built part
- Verification of feature integrity, i.e. whether internal features were fabricated successfully (2D)
- Qualitative assessment of features such as horizontal holes and channels (2D and 3D)
In this project, structured light and height mapping are utilized as the source of in-situ data. To inspect part internals, RTRC will use this processed height map data to identify boundaries of parts in each layer. In executing the project, RTRC and Velo3D will develop a framework required to translate height mapping data into an understanding of the integrity and dimension of internal features.
Project Participants
Project Principal
Other Project Participants
- Velo3D
Public Participants
- U.S. Department of Defense